 Java 學習之路
Java 學習之路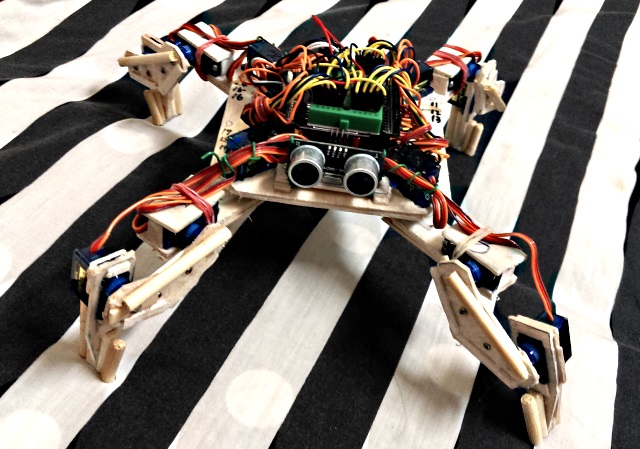
廢材四足機器人(一)修修補補成廢材
|
在製作廢材機器人之前,先來看一下 Plotclock,這是個可以寫出時間的簡單手臂:
這個專案很有趣,使用的電子電路材料是一片 Arudino Uno、三個 Tower Pro 9g servos,至於操作的機體可以用壓克力切割或用 3D 列印,我沒有 3D 印表機,拿去外頭做壓克力切割或 3D 列印,又總覺得少了什麼樂趣。 我看過有人用木頭來實現,不過,我也不熟木工,後來想說,試著用飛機木(巴爾沙木)來做,飛機木只要用美工刀就可以切割,對於不厚的飛機木,甚至可以直接用剪刀,經過了一陣子奮戰,就有了以下的成果:
說是奮戰是因為,飛機木雖然切割容易,不過其易裂的特性,也非常考驗耐性,不過好處就是,裂開也容易使用保麗膠修補,保麗膠對飛機木的黏著性意外地好! 有了這次的製作經驗,對飛機木的控制多少有點自信了,有天下午想到…來做個新玩具…XD 這幾個星期有空就做一點做一點,裂了、斷了就修補、修補再修補,我選用的飛機木稍微薄了一點,因此動用了冰棒棍、竹筷來增加強度,也不是一開始就做正確,使用飛機木的好處就是要修正也很容易,總之也是修正、修正再修正,最後就成了廢材機器人 … XD
你可以在 Github 找到相關的紙型、程式碼等資料 … 製作的方式就是接下來要說明的 … 設計與切割總之,廢材四足機器人的材料就是 …
在木材切割的部份,因為一開始不知道設計的方式,是不是完全正確,一開始我是在紙上畫設計圖:
我將最後可運作的成品實際量測相關尺寸,製作成 PDF 放在 Hexapod.pdf,下載後列印,然後用複寫紙畫到飛機木上再切割就可以了,我選用的飛機木厚度為 2mm,稍微薄了一點,建議使用比 2mm 再厚一些些的飛機木(看過有 4mm),當然,稍厚一些,切割應該是會比較費力一些些,可以自行斟酌。 切割時要注意的是,在四肢的部份,保持木紋走向在長的一邊,因為四足機器人撐起來時,若木紋走向在寬的一邊,飛機木就容易斷裂,斷或裂是也沒關係,反正就想辦法用保麗龍膠、木片等想辦法修補就好了,反正打斷腳骨更加勇(我是沒有拿去給人用壓克力切割,如果你不想跟發機木奮戰,也許可以試試)。 在腳底的部份,我是兩邊各直接黏貼了四小段竹筷,這是後來為了增加靜態平衡能力才加上去的 …
提供的 PDF 紙型中,有個最小的長方型,就是切割後用來各黏貼在腳的兩邊,當然你還是可以使用竹筷,增加腳底的耐磨度。 機器人組裝我建議你四肢逐一組裝,並逐一測試,而不是整個組裝好再來測試,例如:
在逐一組裝四肢時,我讓機器人右邊兩隻腳的兩個馬達各都是 0 度時,才將之接為上圖中的狀態,而左邊兩隻腳則各都為 180 度時才接上去,記得右邊與左邊馬達軸心的方向,都要是面向你的方向,如下圖:
四足的各馬達都有編號,紅色部份標出各要接到 Arduino Uno 哪個腳位,注意,D14 到 D19,就是類比輸入腳位 A0 到 A5,它們也可以做為數位腳位,這些腳位分佈是要與後續的程式相搭配。 為什麼不直接全用數位腳位?才 12 個馬達,數位腳位不是夠嗎?這麼接的原因是比較方便,左邊兩隻腳只要接左邊的腳位,右邊兩隻腳只要接右邊的腳位。 馬達 1-1、2-1、3-1、4-1 為 90 度時,才分別將組好的四肢到身體部份,這時四肢方向差不多呈現對角線 …
接下來就是將 Arduion Uno、超音波感應器等安裝到身體上了,超音波感應器我是做了個簡單小平台,然後用電線綁上去而已:
之前是分別對個別馬達做控制,運轉到想要的角度再進行組裝,接下來,該是將所有電線銜接在一起,安裝電源,撰寫程式控制的時候了,這個部份,我留待下一篇再來繼續吧!趁這個空檔,可以先開始做你自己的機器人,小心一點,別修補得比我的機器人還「廢材」囉!… XD |








關於作者






目前為自由工作者,喜好研究程式語言、框架、社群,從中學習設計、典範及文化。閒暇之餘 記錄所學,技術文件涵蓋 C/C++, Java, Ruby/Rails, Python, JavaScript, Haskell 等多個領域,出版電子書 Java SE 6 技術手冊、Java Lambda Tutorial、Java Tutorial、Python Tutorial、Essential JavaScript、Haskell Tutorial。
